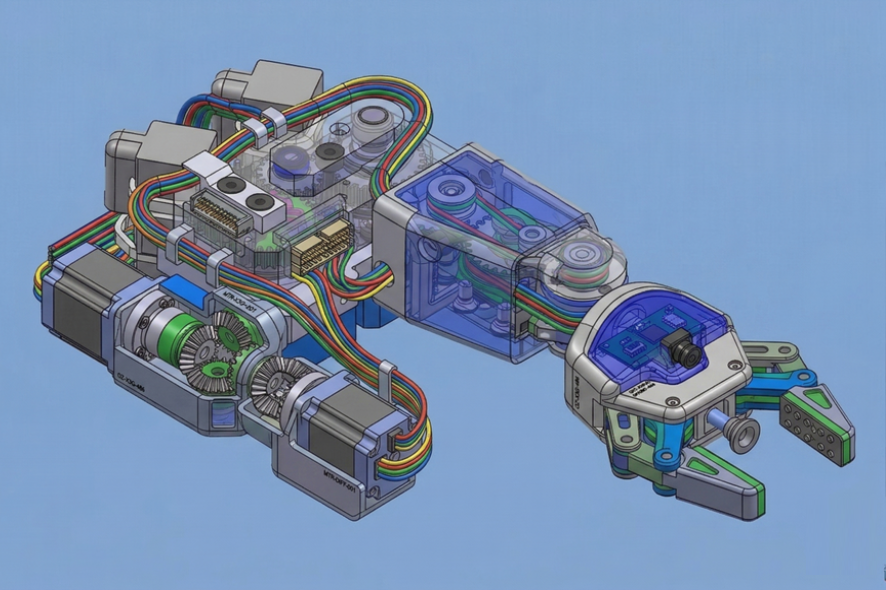
ロボットハンド開発設計
構想から成立まで一貫した機構設計
当社は、ロボットハンドの開発において、仕様検討段階から機構成立まで一貫して対応しています。
把持対象・動作条件・設置環境に応じて、ゼロベースから最適な機構を構築します。
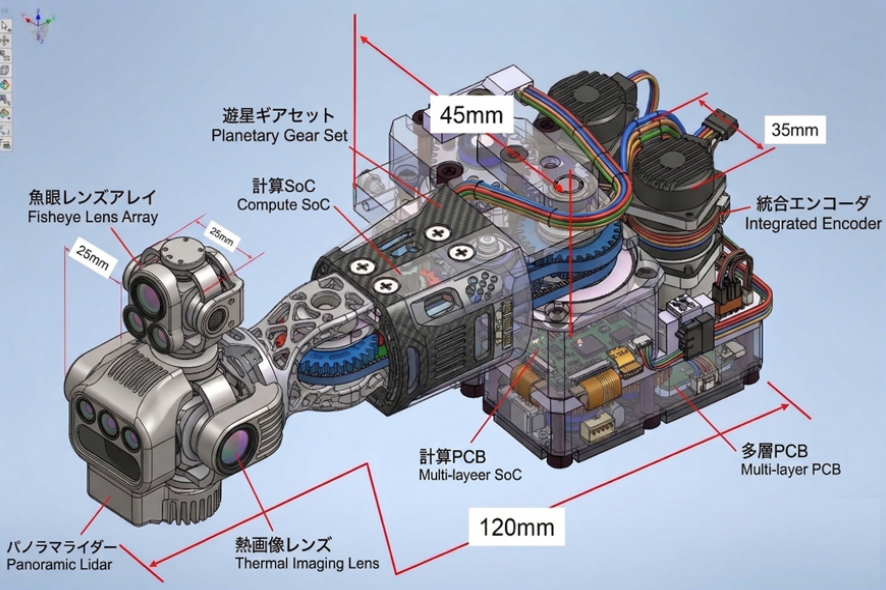
ロボットハンドは、小型化と高機能化が同時に求められるため、
機構・駆動・センサー・配線を高度に統合する必要があります。
当社は、単なる形状設計ではなく、実際に動作し成立する構造設計を行います。
把持性能を決めるコア設計技術
ロボットハンドにおいて最も重要なのは、安定した把持と精密な動作制御です。
対象物の形状・重量・材質に応じて、適切な機構設計が求められます。
当社では以下の設計要素を統合的に検討します。
・把持力・トルク設計
・指先形状および接触面設計
・開閉ストローク・可動範囲設計
・滑り・変形を考慮した保持構造
これにより、安定した把持と高い再現性を実現します。
駆動機構と伝達設計による高精度動作
ロボットハンドの性能は、駆動系と伝達機構に大きく依存します。
限られたスペース内で効率的に力を伝達する設計が重要です。
・ギア機構(遊星ギア等)の最適設計
・モーター配置および駆動効率の最大化
・バックラッシュ低減設計
・応答性を考慮した機構構成
これにより、滑らかで高精度な動作を実現します。
配線・センサー統合による機能性向上
ロボットハンドでは、センサーや制御機器との連携が不可欠です。
当社では、機構設計と同時に電装要素の配置を最適化します。
・エンコーダ・センサー配置設計
・配線ルートの最適化
・可動部における断線防止設計
・省スペースでの統合設計
これにより、高機能かつ信頼性の高いシステムを構築します。
治具・取付設計による実装性確保
ロボットハンドは装置やロボット本体に取り付けて使用されるため、
取付性と交換性を考慮した設計が重要です。
・取付インターフェース設計
・位置決め精度の確保
・交換・メンテナンス性の向上
・剛性を確保した構造設計
現場での運用を見据えた設計を行います。
3D設計による干渉検証と成立性確認
当社は3D CADを活用し、機構全体の成立性を事前に検証します。
内部構造を含めた詳細設計により、設計段階で問題を解決します。
・可動部の干渉チェック
・内部機構の配置検証
・配線・配管の取り回し設計
・組立性・分解性の確認
これにより、試作段階での手戻りを最小限に抑えます。
構造設計による耐久性・信頼性確保
ロボットハンドは繰り返し動作を行うため、
構造の強度と耐久性が品質に直結します。
・フレーム・指部の剛性設計
・荷重による変形・応力分散設計
・摩耗・疲労を考慮した設計
・長期使用を前提とした耐久設計
安定稼働を実現する設計を行います。
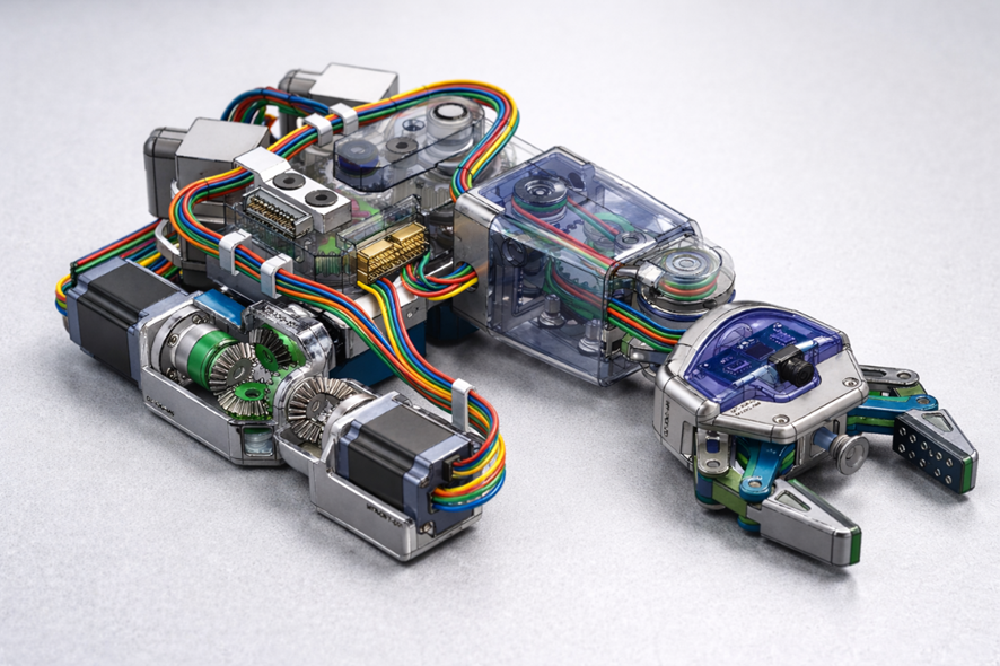
ロボットハンドを成立させる総合力
当社の強みは、把持機構・駆動・配線・構造といった要素技術を統合し、
ロボットハンド全体を設計できる点にあります。
単なる部品設計ではなく、
機能・精度・耐久性を高次元で成立させる設計を行います。
現場で確実に動く設計
当社は「形を作る設計」ではなく、
「現場で確実に動く設計」を提供します。
構想から詳細設計まで一貫して対応し、
実際に使えるロボットハンド開発を支えます。