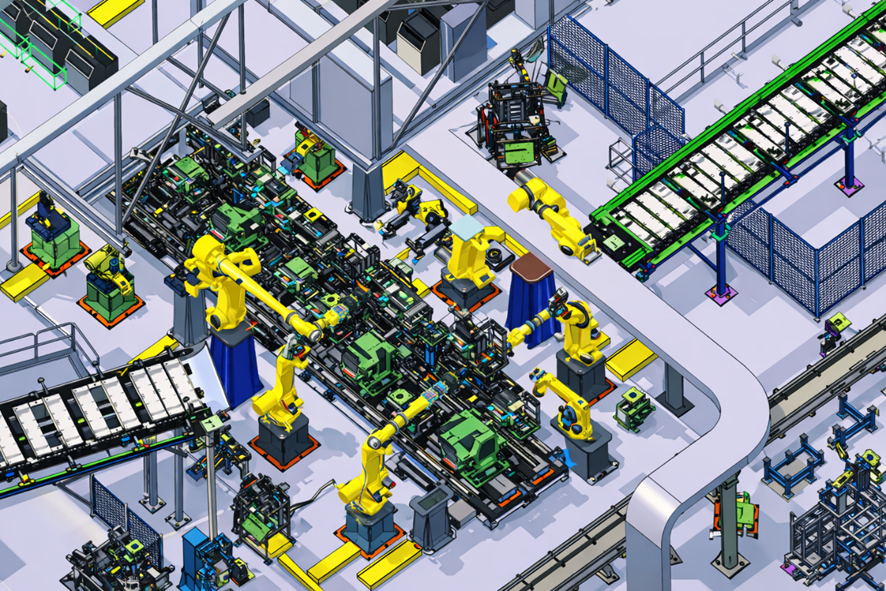
ロボットシステム組立ライン設計
構想から成立まで一貫したライン設計
当社は、ロボットを用いた自動組立ラインの設計において、構想検討から設備全体の成立性確認まで一貫して対応しています。
製品仕様・生産能力・設置条件に応じて、最適なライン構成をゼロベースから設計します。
ロボットシステムは、機械・制御・搬送が複雑に連携するため、
工程・設備・動作を統合した設計が求められます。
当社は、単なる設備配置ではなく、生産として成立するライン設計を行います。
工程設計を起点としたコア設計技術
ロボットライン設計において最も重要なのは、工程全体の最適化です。
単体設備ではなく、流れとして成立させる設計が求められます。
当社では以下の設計要素を統合的に検討します。
- 工程分割および作業内容の最適化
- タクトタイムを考慮した工程設計
- ロボットと人作業の最適分担
- 設備間の処理能力バランス設計
これにより、高効率な生産ラインを実現します。
ロボット配置・動作設計による自動化最適化
ロボットの配置と動作設計は、ライン性能に大きく影響します。
限られたスペースで最大効率を引き出す設計が重要です。
- ロボット配置および動作範囲設計
- 干渉を考慮した軌道設計
- サイクルタイム短縮のための動作最適化
- 多台数ロボットの協調動作設計
これにより、高速かつ安定した自動化を実現します。
搬送システム設計によるライン成立
ライン設計では、ワーク搬送が全体の成立を左右します。
当社では搬送と工程を一体として設計します。
- コンベヤ・パレット搬送の最適設計
- 工程間のバッファ設計
- 搬送タイミングと工程同期
- 異常時の退避・復帰動作設計
これにより、安定稼働と生産性を両立します。
治具設計による品質の安定化
ロボットによる組立では、治具設計が品質を決定します。
高精度かつ安定した組付けを実現する設計を行います。
- 位置決め精度を確保する治具設計
- クランプ機構の最適化
- 製品ばらつきを吸収する構造設計
- 段取り・交換性を考慮した設計
これにより、品質のばらつきを抑えた安定生産を実現します。
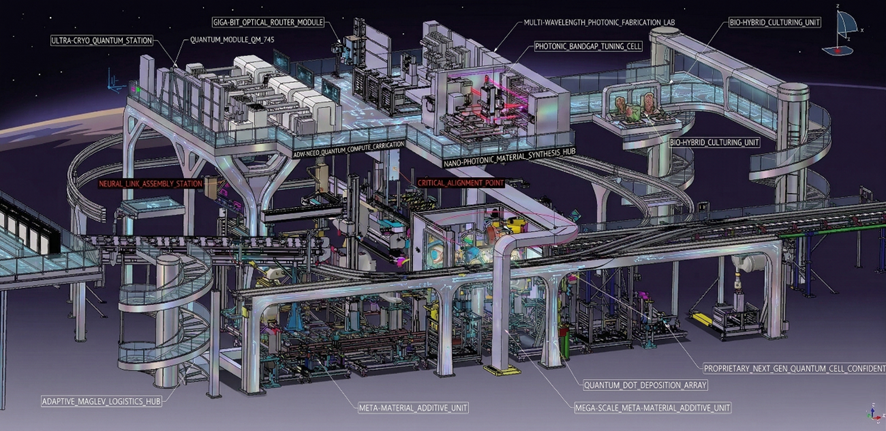
3D設計による干渉検証と成立性確認
当社は3D CADを活用し、ライン全体の成立性を設計段階で検証します。
複雑な設備構成を立体的に把握し、問題を事前に解決します。
- ロボット・設備間の干渉チェック
- 搬送経路の成立性確認
- 設備配置の最適化検証
- 保守・作業スペースの確保
これにより、立上げ時の手戻りを最小限に抑えます。
設備統合設計による高信頼ライン構築
ロボットラインでは、各設備の連携が重要です。
当社では設備全体を統合した設計を行います。
・ロボット・搬送・周辺機器の統合設計
・制御システムとの連携設計
・安全対策(柵・インターロック)の設計
・異常時のライン全体制御設計
これにより、安全かつ安定したライン運用を実現します。
ロボットシステムラインを成立させる総合力
当社の強みは、工程設計・ロボット・搬送・治具といった要素技術を統合し、
ライン全体を設計できる点にあります。
単なる設備設計ではなく、
生産性・品質・安定性を高次元で成立させる設計を行います。
現場で確実に稼働する設計
当社は「並べる設計」ではなく、
「現場で確実に稼働するライン設計」を提供します。
構想から詳細設計まで一貫して対応し、
実際に成果を出す生産ラインを支えます。